Interfaz humano-robot para discapacidades de las extremidades superiores
El proyecto HARIA, financiado por «Horizonte Europa«, allanará el camino con una nueva tecnología que conecta el sistema sensoriomotor humano con el sistema de actuadores y sensores de un robot.
Esto facilita la consciencia, la confianza y la comprensión mutuas.
HARIA redefinirá la naturaleza de la interacción física entre humanos y robots mediante tecnología que consiste en extremidades robóticas supernumerarias portátiles y terrestres impulsadas por IA, así como interfaces sensoriomotoras portátiles.
Los métodos de aumento permitirán a los usuarios controlar y sentir directamente las extremidades adicionales aprovechando la redundancia del sistema sensoriomotor humano a través de interfaces portátiles.
HARIA se dirigirá a personas con discapacidades motoras crónicas unilaterales o bilaterales de las extremidades superiores, mejorando su calidad de vida.
Objetivo
HARIA redefine la naturaleza de la interacción física humano-robot (HRI), sentando las bases de un nuevo campo de investigación, es decir, el aumento sensoriomotor humano, cuyos elementos constitutivos son:
I) extremidades robóticas supernumerarias portátiles y conectadas a tierra impulsadas por IA e interfaces sensoriomotoras portátiles;
II) métodos de aumento que permiten a los usuarios controlar y sentir directamente las extremidades adicionales explotando la redundancia del sistema sensoriomotor humano a través de interfaces portátiles;
III) poblaciones objetivo claras, es decir, individuos con accidente cerebrovascular crónico y lesiones de médula espinal y,
IV) otros escenarios de aplicación del mundo real.
Demostrando el extraordinario valor del cambio de paradigma que HARIA representa en HRI y el gran impacto en la motivación para reutilizar el brazo o los brazos paréticos, con la consiguiente mejora de la calidad de vida.
Las extremidades supernumerarias serán controladas parcialmente por inteligencia artificial y parcialmente bajo el control directo del humano que obtiene la agencia de algunos parámetros de movimiento de las extremidades supernumerarias.
Desde el punto de vista del control, es fundamental encontrar el equilibrio adecuado entre los parámetros de la tarea de movimiento controlados por el usuario y el nivel de autonomía del robot.
Esta interacción es posible gracias a la interfaz sensoriomotora portátil, que establece una conexión entre el sistema sensoriomotor humano y el sistema de actuadores y sensores del robot, lo que permite la conciencia recíproca, la fiabilidad y la comprensión mutua.
Encuentra su aplicación natural en la asistencia a personas con discapacidades motoras crónicas unilaterales o bilaterales de las extremidades superiores.
Los desarrollos tecnológicos y metodológicos seguirán un enfoque de diseño centrado en el usuario, ya que solo los pacientes con discapacidades son plenamente conscientes de sus necesidades reales (aún no satisfechas) en las actividades de la vida real.
Castilla- La Mancha
Castilla-La Mancha lidera el proyecto europeo HARIA para desarrollar un «tercer brazo robótico» controlado por Inteligencia Artificial.
Esta línea desarrolla extremidades robóticas, como un «tercer brazo» que opera mediante señales musculares o sensores de movimiento y que, supervisadas con inteligencia artificial, devuelven sensaciones táctiles para reforzar la percepción y el control.
Un «tercer brazo robótico», controlado por Inteligencia Artificial, se convierte en una» solución real» en las que trabaja el grupo FENNSI (Exploración Funcional y Neuromodulación del Sistema Nervioso), para aumentar la autonomía y calidad.
Castilla-La Mancha se consolida como referente nacional e internacional en neurorrehabilitación, impulsando proyectos de investigación traslacional que buscan impactar directamente en la autonomía y calidad de vida de las personas.
Esta prioridad se enmarca dentro del nuevo Plan de Salud H3.0 de la Consejería de Sanidad manchega.
El proyecto europeo HARIA (Human Augmentation through Robotic Intelligent Agents) inaugura en el Hospital Nacional de Parapléjicos un nuevo campo de trabajo: la aumentación sensoriomotora humana.
Donde la neurociencia se encuentra con la tecnología
El grupo FENNSI combina la evaluación funcional del sistema nervioso central y periférico con técnicas avanzadas como la estimulación magnética transcraneal.
Su misión es investigar cómo funciona el sistema nervioso y cómo modular su actividad mediante estrategias no invasivas, tanto tecnológicas como farmacológicas, para mejorar la recuperación tras una lesión.
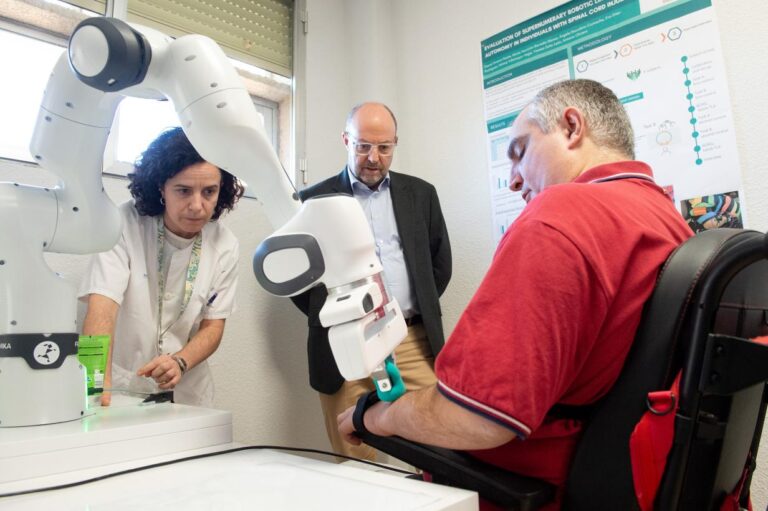
Estas extremidades robóticas se probarán en personas con lesión medular e ictus para mejorar la rehabilitación, fomentar el uso activo del miembro afectado y aumentar la autonomía personal en actividades cotidianas.
A largo plazo, se contempla su integración en el hogar y en entornos laborales y asistenciales.
Estamos hablando de que un paciente pueda llegar a manejar un ‘tercer brazo’ robótico como si fuera suyo, algo que hace unos años sonaba a ciencia ficción.
El proyecto HARIA, liderado por el Hospital Nacional de Parapléjicos, está coordinado por la Università degli Studi di Siena y reúne a centros punteros como el Istituto Italiano di Tecnologia, el Karlsruher Institut für Technology, la Fondazione Santa Lucia, Lunds Universitet, Twente Medical Systems International y la Universidade de Lisboa, entre otros.
Nuevo desafío
Además, grupo FENNSI ha sido seleccionado como beneficiario del único proyecto de investigación que se financiará a través del reciente convenio con la Fundación Amancio Ortega.
Este proyecto se centrará en la recuperación de la mano tetrapléjica mediante estimulación asociativa y se iniciará el próximo año.
Futuro
Este proyecto también irá más allá de la aplicación a la salud, iniciando una nueva era de aumento intuitivo y fluido entre humanos y robots mediante interfaces sensoriomotoras portátiles y extremidades supernumerarias.























































